




2. 北京理工大学深圳研究院, 广东深圳 518057;
3. 香港城市大学机械与生物医学工程系, 香港 999077
2. Shenzhen Research Institute, Beijing Institute of Technology, Shenzhen 518057, Guangdong, P. R. China;
3. Department of Mechanical and Biomedical Engineering, City University of Hong Kong, Hong Kong 999077, P. R. China
21世纪是一个充满信息的时代,图像作为人类感知世界的视觉基础,是人类获取信息、表达信息和传递信息的重要手段。但在某些情况下,仅通过人眼不能获取图像的全部信息,而影像信息处理技术的出现能够帮助人们更客观、准确地认识世界。随着计算机技术和影像传感器件如CCD、CMOS的快速发展,影像信息处理技术已经在无损检测、医学检测以及干涉计量等领域得到广泛应用。在干涉测量领域中,波前相位重构主要依赖于以干涉条纹图为载体的影像信息处理方法,通过干涉条纹图的相位来反映被测对象的信息[1]。当前相位干涉条纹分析算法主要包括时域移相算法[2,3]和空间载频算法[4,5]。时域移相算法因为其测量精度高在光学检测中得到广泛的应用,但至少需要3幅干涉条纹图,且容易受到外界环境的影响,不适合动态测量。空间载频算法仅需要一幅空间载波干涉条纹图并且相对受外界振动影响较小,常见的有快速傅里叶变换法[5](Fast Fourier Transform,FFT)和窗口傅里叶变换法[6,7](Window Fourier Transform,WFT)。快速傅里叶变换法的数据处理比较简单,而且能够有效抑制噪声的影响,但是它难以处理条纹密度变化较大或存在封闭条纹的干涉条纹图;窗口傅里叶变换能够实现时域信号的局部化,由于其窗口尺寸一旦确定就无法改变,不适合条纹频率变化的情况,从而限制了它在含有较高频和较低频条纹图中的应用。针对时域移相法和空间载频算法在解调干涉条纹图的相位信息中存在的问题,Eugenio Garbusi[8]等提出了空域卡雷算法。该算法在处理单幅干涉条纹图时无需引入空间载频,且不易受外部空气扰动及机械振动的影响,有利于动态测量。但由于空域卡雷算法存在一些如符号的不确定性、存在病态没有唯一解和奇点及其邻域处的相位值误差较大等问题,计算得到的结果精度不是很高。
本文结合泰勒展开近似的思想,在空域卡雷算法基础上,提出一种对目标相位进行二次逼近的算法,进一步提高对单幅闭合干涉条纹图的相位解调精度。Matlab仿真结果表明,该算法得到的相位残差与空域卡雷算法相比降低了25.8%,有效证明本文提出的算法能够提高干涉条纹图的相位重构精度。
1 空域卡雷算法通常单幅干涉条纹图的光强分布可以表示成:

式中I0(x,y)为背景光强分布,V(x,y)为干涉条纹图的对比度,Ф(x,y)为干涉条纹图的真实相位。
以干涉条纹图的光强分布沿x轴方向变化的一维情形为例。由于单幅闭合条纹具有非单调性,相位展开过程中往往会出现相位歧义现象。因此给出如下假设:
(a) 假设干涉条纹图的背景光强分布I0(x,y)和条纹对比度V(x,y)是关于空间坐标x和y的缓慢变化函数。则以任意一个像素点(x0,y0)为中心的确定的小窗口内I0(x,y)和V(x,y)的值保持不变,即:
(b) 假设干涉条纹图的真实相位Ф(x,y)是一个连续可微的函数,在像素点(x0,y0)处将干涉条纹图的相位Ф(x,y)进行泰勒展开,得到:
取式(3)的线性部分,即:

由上述(a)和(b)假设,以任意一个像素点(x0,y0)为中心的小工作窗内的光强I(x,y)的表达式可以表示成:

在如图1所示的工作窗内,每个像素点的相位与中心像素点(x0,y0)的相位在沿着x轴方向分别能产生一个不同的差值,即在空间上产生相移。已知时域相移算法中的卡雷算法[9]将4幅干涉条纹图的相位增量视为变量且变量的值是固定的。为了能够在单幅闭合条纹图中应用卡雷算法,通过将探测器上的像素点进行恰当的分割,使在相等空间间隔的像素点之间得到的相位变化量是固定的。
 | 图1 探测器组列相邻像素点的相位变化 Phase shifting with a set of adjacent pixels of the detector array |
如图1所示,沿着x轴方向提取一组像素点,这些像素点的位置坐标依次可以表示为:x0-3p,x0-2p,x0-p,x0,x0+p,x0+2p,x0+3p(其中p代表一个像素单位)。取4个像素点分别为x1=x0-3p,x2=x0-p,x3=x0+p,x4=x0+3p,假设中心像素点(x0,y0)的相位改变量ΔΦ=0,则像素点x1、x2、x3、x4的相位变化量分别为:

其中,p代表一个像素单位, 。
。
与相位变化量相应的4个像素点的光强值分别表示如下:
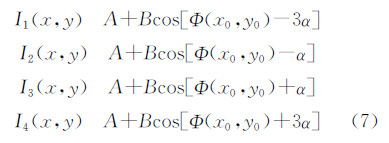
根据卡雷算法,由等式组(7)可以推导出相邻像素点间的相移量α的表达式为[10]:

由公式(7)和(8)推导得出中心像素点(x0,y0)相位值的表达式为:

在计算每个点的相位值时分子和分母均取正值,得到相位的取值范围在[0,π/2]。通过判别表达式m=I2-I3和n=(I2+I3)-(I1+I4)的正负来进行相位展开[13],使相位的值域从[0,π/2]扩展到[-π,π]。最后,根据一维解包裹算法对得到的相位值进行一维解包裹,得到单幅条纹图中每一点的相位值,实现相位重构。
2 迭代修正法原理单幅闭合条纹具有非单调性,在条纹图中有些像素点的位移为空值或者相位的一阶偏导不存在,这样的点称为奇点。由于空域卡雷算法对单幅干涉条纹图进行相位解调时,选取相邻的7个像素点作为工作窗,具有邻域性,当奇点处的相位存在误差时也会引起其邻域范围内的计算相位精度下降。此外,类似与移相卡雷算法中存在的解谐误差,光强的非线性也会引起额外的计算精度损失。针对这个问题,本文提出了迭代修正算法,从而实现高精度单幅闭合干涉条纹图的相位重构。
虽然通过空域卡雷算法计算得到的相位值存在误差,但与真实相位值基本接近。由等式I(x,y)=I0(x,y){1+V(x,y)cos[Ф(x,y)]}可知,光强值I(x,y)和相位的余弦值cos[Ф(x,y)]呈线性关系。如上文所述,为了能够在单幅闭合条纹图中应用卡雷算法,选取7 pixel×7 pixel小窗口作为工作窗。因为在空域卡雷算法中曾假设干涉条纹图的背景光强I0(x,y)和条纹图的对比度V(x,y)是关于空间坐标x和y的缓慢变化函数。用最小二乘法对窗口内所有像素点对应的光强值I(x,y)和相位的余弦值cos[Ф(x,y)]进行线性拟合,得到工作窗口内的条纹图的背景光强和条纹图对比度的近似值。由此得到光强近似值和实际值分别表示如下:
式中,δ表示计算得到的光强值(带有下标e)与实际光强之间的残差,ε为实际相位与计算得到的相位之间的残差。
由空域卡雷算法原理可知,在奇点处得到的相位值存在误差,这些误差在相位高度图中以一些凸出的线条形式出现,称为毛刺。将空域卡雷算法得到的相位值作为初始值进行迭代,在进行迭代修正之前,为了减少误差有必要对毛刺进行预处理。经分析,奇点处的实际光强值I与通过由线性拟合后得到的光强值Ie差值较大。找到与毛刺相对应的像素点,合理设置拟合后的光强值使在奇点处的满足小量ε要求。
假设经过线性拟合得到的背景强度I0(x,y)和条纹对比度V(x,y)非常接近真实值,则光强差值δ可以写成如式(11)所示:

通过对真实相位值在相位值Фe处进行泰勒展开得到:
因为ε是一个无穷小量,当sinФe≠0,可以取式(12)的线性部分并代入到式(11)得到:

根据式(13)我们可以得到迭代小量值ε的表达式为:

式中,I0e和Ve分别是经过线性拟合后得到的工作窗里的背景光强和条纹对比度的近似值。
在工作窗内,由线性拟合得到的光强值Ie(x,y)以及经过预处理后的相位值Фe作为迭代初始值,运用等式(14)作为迭代修正量,通过循环对每一点处的相位值进行修正。
综上所述,解调任意单幅闭合干涉条纹图的基本过程可以表述为:
(1) 获取单幅闭合干涉条纹图,并用计算机选择合适的方法对干涉条纹图进行预处理,得到I(x,y)=I0(x,y){1+V(x,y)cos[Ф(x,y)]};
(2) 利用空域卡雷算法进行相位解调,结果为Фe;
(3) 在7 pixel×7 pixel小窗口内,根据实际的光强值I(x,y)和计算得到的相位初始值Фe运用最小二乘法进行线性拟合得到条纹图的背景光强I0e和对比度Ve,同时进一步计算出该窗口内每一点对应的的光强值Ie。
(4) 构造优化函数  ,然后在迭代循环的过程中通过优化函数进行迭代优化,最后得到相位的精确值。
,然后在迭代循环的过程中通过优化函数进行迭代优化,最后得到相位的精确值。
以上迭代过程如图2所示。
 | 图2 迭代流程图 Iterative flow chart |
单幅干涉条纹图的相位分布只有在满足单调递增或单调递减的条件下才可以从相应的算法中正确提取条纹图的相位。无载频的干涉条纹图(仅有几条且为闭合的条纹)中存在曲率的方向和符号的不确定性等问题,因此,仅凭一幅闭合干涉条纹图无法判断是待测相位还是其反向相位,对两相位的取舍还要通过其他先验知识。空域卡雷算法可以分析并且不需要经过先验知识判断,直接得到闭合条纹图的位相信息。本文用Matlab模拟仿真了条纹数量很少的情况下,通过本文中提出的迭代修正法对由空域卡雷算法解调出的相位进行修正,进一步提高了结果的精度。
图3是由计算机模拟生成的大小为256 pixel×256 pixel的单幅峰值干涉条纹图,其中干涉条纹图的相位表达式为φ(x,y)=0.02peaks(x,y)+4πx;背景光强为I(x,y)=150exp[-0.02(x2+y2 )];条纹调制度为V(x,y)=100exp[-0.02(x2+y2)],其中-1≤x≤1,-1≤y≤1。先通过空域卡雷算法对其进行分析得到位相信息的初始值,其次由迭代修正法对初始值进行迭代修正,最终得到的结果如图4所示,依次分别为由计算得到包裹位相图、迭代前后位相展开图以及理想位相与实际位相的残差图。图4d和图4f相应的RMS值分别RMSd=0.0094和RMSf=0.0069,单位为弧度。
 | 图3 峰值干涉条纹图 Peaks interference pattern |
从图4a、c可知,理想相位的峰谷值和均方根值分别为:PV=0.2656,RMS=0.0356;由空域卡雷算法得到的相位的峰谷值和均方根值分别为:PV=0.3296,RMS=0.0416。两者相减得到残差的峰谷值和均方根值分别为:PV=0.0892,RMS=0.0094,从而证明由空域卡雷算法处理单幅闭合干涉条纹图得到的相位信息已经与真实相位值基本接近。从整体相位残差分布(图4d)来看,与峰谷相对应的位置也即是奇点处,由空域卡雷算法计算得到的相位值与实际值偏差较大,与奇点相邻的周围点得到的结果也有偏差。这表明空域卡雷算法在计算过程中具有邻域性,奇点处引起的相位误差会导致其邻域点相位的计算结果的精度降低。针对这些问题,本文在空域卡雷算法的基础上,根据泰勒公式近似提出了迭代修正法,进一步对初步得到的相位进行二次修正。图4e是经过几次迭代修正后的相位信息图,其峰谷值和均方根值分别为:PV=0.32945,RMS=0.0396;从它与理想相位信息相减得到的残差(图4f)的整体分布来看,在峰谷处(即奇点处)得到的相位的残差值明显降低,计算得到整体残差的峰谷值和均方根值分别为:PV=0.08898,RMS=0.0068。通过计算并对比由空域卡雷算法得到的位相信息和迭代修正算法得到的位相信息的相对残差(即计算得到的RMS值与实际理想RMS值之比),经过几次迭代修正后的相对残差值与迭代前相比降低了25.8%。这一结果充分并有效地证明本文提出的迭代修正算法能够进一步提高解调单幅干涉条纹图相位信息的精度,在奇点及其邻域处获取的相位信息更加精确,从而使得到的结果进一步接近实际值。据此可判断,随着迭代次数的增加,计算得到的相位信息将会更加接近真实值。
 | 图4 计算机模拟仿真干涉图 (a) 原始相位;(b) 包裹相位;(c) 相位解调;(d) 相位残差;(e) 迭代后的相位解调;(f) 迭代后的相位残差 Computer simulated interference pattern (a) original phase,(b) wrapped phase,(c) unwrapped phase,(d) residual phase, (e) unwrapped phase after iteration,(f) residual phase |
空域卡雷算法虽然可以从单幅闭合干涉条纹图中提取相位,但是在对每一点进行解调相位时,该点的精度容易受到其邻域点相位值精度的影响。如果相位图中存在奇点,则在奇点及其周围相邻的点得到的相位值会存在一定的误差。针对空域卡雷算法的这些问题,提出了一种基于影像处理的单幅闭合干涉条纹图相位重构新算法。以空域卡雷算法得到的相位估计值作为初始值,根据由泰勒公式近似进行迭代修正,从而实现高精度的单帧闭合干涉条纹图相位重构。通过Matlab仿真结果表明,基于干涉条纹影像处理的迭代修正方法有效地解决了空域卡雷算法中存在的如空间相移量变化的非线性、光强变化的非线性以及邻近点的精度容易受奇点处精度的影响等问题,证明这种影像信息处理算法可以有效获取高精度单幅闭合干涉条纹图的相位信息。
| [1] | Rajshekhar G,Rastogi P. Fringe analysis:premise and perspectives[J]. Optics & Lasers in Engineering,2012,50(8):3-5. |
| [2] | 徐建程.相位干涉测量的信息理论分析[D].中国工程物理研究院,2009. Xu J C. Information theory analysis of phase interferometry[D]. China Academy of Engineering Physics,2009. |
| [3] | Surrel Y. Design of algorithms for phase measurements by the use of phase steping[J]. Applied Optics, 1996,35(1):51-60. |
| [4] | Takeda M,Ina H, Kobayashi S. Fourier-transform method of fringe-pattern analysis for computer-based topography and interferometry[J]. Optical Society of America, 1982,72:156-160. |
| [5] | Pirga M, Kujawinska M. Two directional spatial-carrier phase-shifting method for analysis of crossed and closed fringe patterns[J]. Optical Engineering, 1995,34:2459-2466. |
| [6] | QianK M. Windowed fourier transform for fringe pattern analysis[J]. Applied Optics, 2004,43(18):2695-2702. |
| [7] | Qian K M, Soon S H. Two-dimensional windowed fourier transform for noise reduction in fringe pattern analysis[J]. Optical Engineering, 2005,44(7):0705601-1-0705601-9. |
| [8] | Eugenio G,Christof P,Wolfgang O. Single frame interferogram evaluation[J]. Applied Optics,2008,47(12):2045-2052. |
| [9] | Carre P.Installation etutilisation du comparateur photoelectrique et interferential du Bureau International des Poidset Mésures[J]. Metrologia,1996,2(1):13-23. |
| [10] | Malacara D. Phase Shifting Interferometers in Optical Shop Testing[M]. New York and London:Wiley,1998. Chap 14. |